Intoduction
After the Industrial revolution, many industries came into existence. Their main motto is to make the Resources (products) available for the growing population. These resources may include food products, materials for construction, clothes etc… Hence in industries there will be mass production of same product. Initially humans are employed to do these repetitive tasks. With the advancement in technology, these industries are searching for an alternative to accomplish their motto.
The alternative is a Manipulator (Robotic arm), which can do repetitive tasks without being tired. The field of engineering that deals with the design, control and programming of these manipulators is Robotics.

Applications
- As mentioned earlier manipulators are used for repetitive tasks (pick and place).
- They are installed in assembly lines to perform some predefined activities(welding)
- They can be used for handling radioactive materials or places which are not accessible by humans.
- Items that are too heavy, too hot and too large for the workers to handle can be shifted by these Manipulators.
Mechanical Structure
Before discussing the mechanical structure, there is a need for understanding some basic terminologies in Manipulators.
- Link
- Joints
- Degrees of freedom (DOF)
- End effector
- Workspace
1.Link
It is a resistant body or a group of resistant bodies in a mechanism that have relative motion with other members in a mechanism.
2.Joints
Two or more links are connected at one point, which we call a joint.There are many classifications for joints, one classification is important in our discussion.Based on the relative motion between two links they are classified into types
- Revolute joint : If the relative motion between links is rotary then it is a revolute joint.
- Prismatic joint : If the relative motion between links is linear then it is prismatic joint.
3.Degrees of freedom (DOF)
It’s the number of independent motions that an object can perform in 3D space.
Consider a body in 3D space (fig 1), it has 6 DOF as shown i.e. it can have 3 translatory and 3 rotational motions along three mutually perpendicular axes. Now if the body is in 2D space (fig 2), the DOF reduces to 3.
Fig:1 DOF of a body in space
Fig 2: DOF of a planar body

In case of Manipulator, each link will be having an independent motion w.r.t the previous link. So the No. (Number) of DOF will be equal to the No. of links in the Manipulator.
4.End effector
The part which is connected to the last link of the manipulator (end part of the Robotic arm) which is used to interact with the environment is called End effector. It can be –
- Tool (fig 3) : For performing Welding, Drilling, Grinding etc…
- Gripper (fig 4) : For Pick and Place applications.
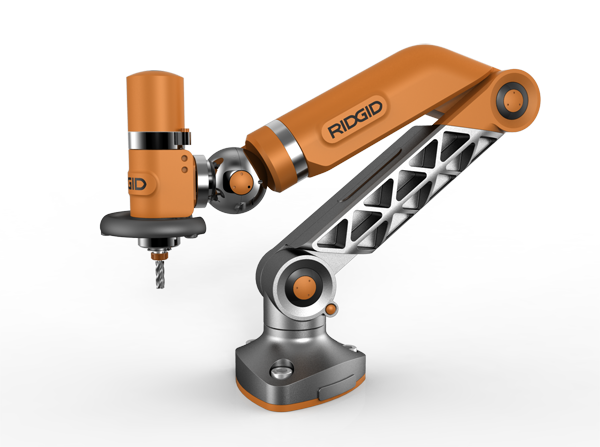
Fig 3:Manipulator having tool as an End effector
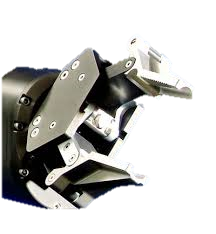
Gripper
NOTE: The End effector is not included in the DOF
5.Workspace
The reachable volume of the End effector is called as the workspace. It’s of two types_
- Reachable Work Space (RWS) :
The points in the workspace which can be reached in only one orientation is the RWS.
- Dexterous Work Space (DWS) :
The points in the workspace which can be reached in all orientations is the DWS.
Factors affecting manipulator’s workspace are
- No. of DOF
- Manipulator configuration
- Link lengths
- Range of joint space
With this understanding we can straight away go to the mechanical structure of Manipulator
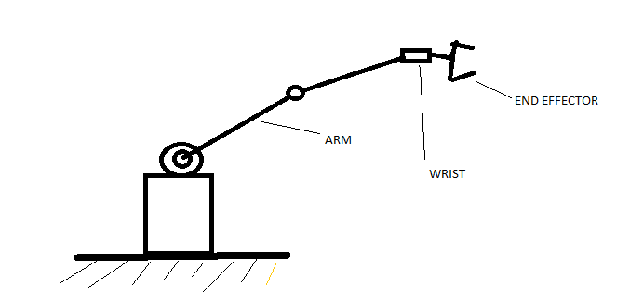
The Mechanical structure consists of links connected by joints that forms an Arm which is used position the End effector and a Wrist to orient it.
Based on the mechanical structure, Manipulators are classified into three types
- Parallel Manipulator(fig 5) : The links form a closed loop kinematic chain.
- Serial Manipulator : The links of this Manipulator form an open loop kinematic chain.
- Hybrid Manipulator : It’s a combination of both serial and parallel manipulator

Parallel Manipulator
Here we will have our upcoming discussions on Serial Manipulators(fig 6). As mentioned earlier, these are Open kinematic chain mechanisms i.e. all the links are connected in series.
Advantage : workspace is larger than those of Parallel Manipulator of same size.
Disadvantage : For Serial Manipulator, Payload is very less.
In later discussions, Serial Manipulator is referred as Manipulator.

Serial Manipulator