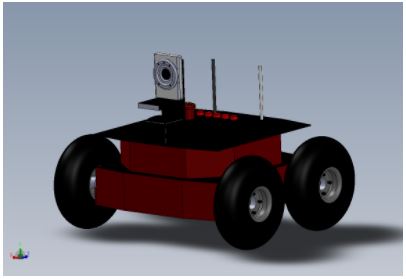
QBOT

Make:Quanser
The Quanser QBot 2 for QUARC is an innovative open-architecture autonomous ground robot built on a 2-wheel mobile platform. Equipped with built-in sensors, a vision system, and accompanied by extensive courseware, the QBot 2 is ideally suited for teaching undergraduate and advanced robotics and mechatronics courses.
Specifications:
1. Platform Kobuki mobile base by Yujin Robot
2. Number of wheels :2
3. QBot 2 diameter :35 cm
4. QBot 2 height (with Kinect mounted) :27 cm
5. Battery life:3 hours
6. Maximum linear speed :0.7 m/s
7. Available payload app. :4.5 kg
8.Sensors included:
3 digital bumper sensors
3 digital wheel drop sensors
3 analog and digital cliff sensors
3-axis gyroscope
2 wheel encoder inputs
2 wheel speed outputs
2 digital LED outputs
4 digital power enable outputs
2 analog motor current inputs
3 digital buttons
2 overcurrent sensors
1 Z-axis angle measurement (heading)
1 battery voltage sensor
1 Kinect RGBD sensor
9.Additional I/O channels available:
8 reconfigurable digital I/O channels
4 analog input channels
2 encoder input channels
4 PWM output channels
1 SPI bus channel
1 UART serial port (interface 3.3 V serial device)
1 I≤C serial bus channel
10. On-board computer Gumstix DuoVero Zephyr with integrated 802.11 b/g/n WiFi
11. Memory 1 GB DDR SDRAM, 32 MB Flash
12. QUARC maximum sample rate 1,000 Hz
13. Camera resolution 640 x 480
14. Depth sensing 11 bit
15. Depth sensor range 0.5 m – 6 m
PLC TRAINER KIT
Make: MTAB ENGINEERS PVT LTD, CHENNAI,INDIA Cost: 3.3lakhs Year: 1999 Specifications:
1. Siemens PLC model S7-214; Total Digital inputs-22, Digital output-18; Analog Input-2, Analog Output-1.
2. Step 7/Microsoftware: Digital Display TD200.
3. Static Module, Sensor Module, Relay Module,5 Star-Delta Module and Conveyor Module and Pnematic Module. |
PROCESS CONTROL TRAINER:

Make: ANSHUMAN TECH PVT.LTD.,PUNE,INDIA. Cost: 1.3lakhs Year: 1999 Specifications:
1. Electro Mechanical Setup.
2. Sensors-PH-Sensor,Conductivity Sensor,Flowmeter, Humidity Sensor, and Smoke Sensor.
|
SCORBOT ERV ROBOT

Make: ESHED ROBOTEC, ISRAEL.
Cost: 4.2 lakhs.
Year:1992
Specifications:
1. Five DOF+ Servo Gripper with Teach Pendant ; Max Reach -610mm.
2. Base Rotation-310 Degrees,Shoulder- ?130/-35 Degrees,Elbow- ?130Degrees, Wrist- ?130Degrees
3. Pay Load-1Kg.
|
PNEUMATIC TRAINER KIT:

Make: FESTO CONTROLS PVT LTD, BANGALORE, INDIA.
Cost: 4.07 lakhs.
Year: 2005 Specifications
1. Jun Air compressor-Out put Pressure-8bar, Speed of rotation- 2900rpm; Max. Operation-15min on/15min off
2. Profile plate and Stand ,Compressed air filter unit with pressure regulator and various types of Pressure control valves, cylinders, flow control valves and PLC.
|
MINI ROBOT WITH SOFTWARE

Make: MTAB ENGINEERS PVT LTD,CHENNAI, INDIA.
Cost: 1.8 lakhs.
Year: 2008
Specifications:
1. Five DOF+ Gripper Open & Close
2. Number of Stepper Motors : 5 Nos
3. Payload : 250 gms
4. Link Rotation: Waist- +300 degrees, Shoulder-+90 degrees, Elbow – +90 degrees Pitch – +180 degrees and Roll- +200 degrees
5. Controller : PC based Stepper Control algorithm.
|
RECONFIGURABLE UNIVERSAL ROBOT KIT- RCS-6 WITH SOFTWARE

Make: FALCON,MUMBAI, INDIA.
Cost: 1.15 lakhs.
Year: 2008
Specifications:
1. Types of Robots reconfigured : Snake, Chemist, Fingers, Golfer, Coffee Maker, Bubbler,Strider, Dancer, Thrower.
2. Servo Motor Specifications :Range of Motion Per Axis : Max. 180 deg : Accuracy of Motions : 0.72 deg for 180 deg Range.
|
RECONFIGURABLE MOBILE PROGRAMMABLE ROBOT KIT

Make: LEGO GROUP, DENMARK
Cost: 1.6 lakhs.
Year: 2008
Specifications:
1. Programmable 32-bit brick, including Bluetooth wireless communication Minimum 4 input, 3 output ports. 6-wire digital platform.
2. 8-bit AVR microcontroller and 32-bit ARM7 microcontroller .
3. 3 Servo Motors with built-in rotation sensor.
4. Lego Mindstorms Education NXT software .
5. Sound sensor, ultrasonic sensor and Light sensor. |
|

Hello, just wanted to say, I liked this post.
It was inspiring. Keep on posting!
Dear sir,
I am a researcher and working on robots. I have all the kit of RECONFIGURABLE UNIVERSAL ROBOT – RCS-6 but my CD was broken. I request you to send me the contents of CD which was sent with that.
Hope you contact me soon.
Which CD you are taking about?